Jonathan Salfity
PhD Candidate, Robotics and AI · UT Austin
Co-Founder · geCKo Materials
Co-Founder · geCKo Materials
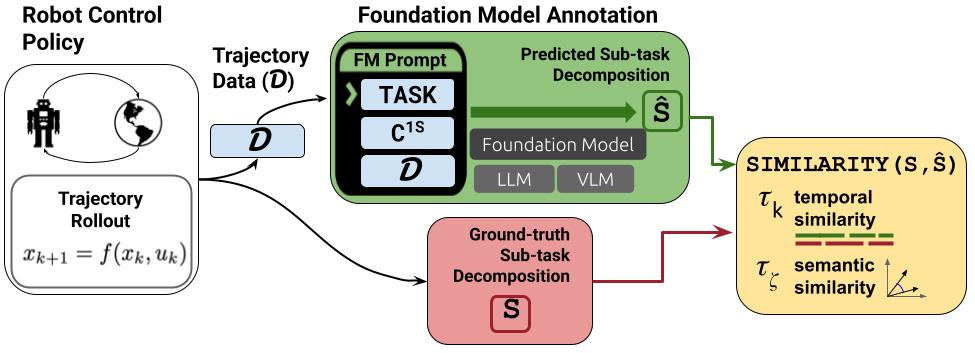
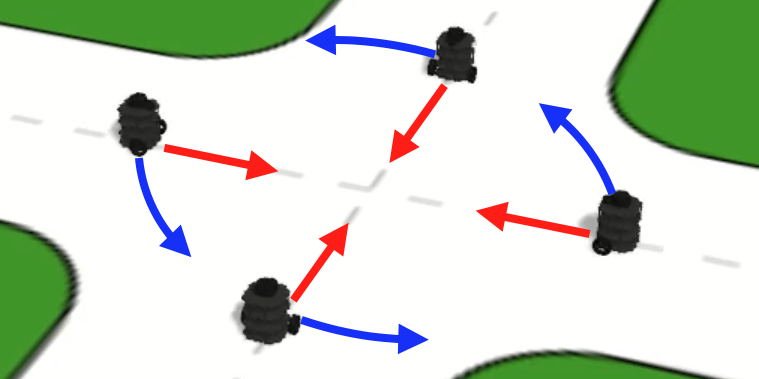
I am a final year robotics and AI PhD student in the Nuclear and Applied Robotics Group at UT Austin, advised by Mitch Pryor. My current research focuses on robotic skill and behavior composition for modular robots. The first two years of my PhD focused on game theory, trajectory generation, and nonlinear optimization.
I co-founded geCKo Materials in 2021, a hardware manufacturing startup commercializing biomimetic industrial adhesives. We've recently raised ~$10M, built a team of 10+, and ship gMDA weekly. Our CEO and the team have been crushing it!
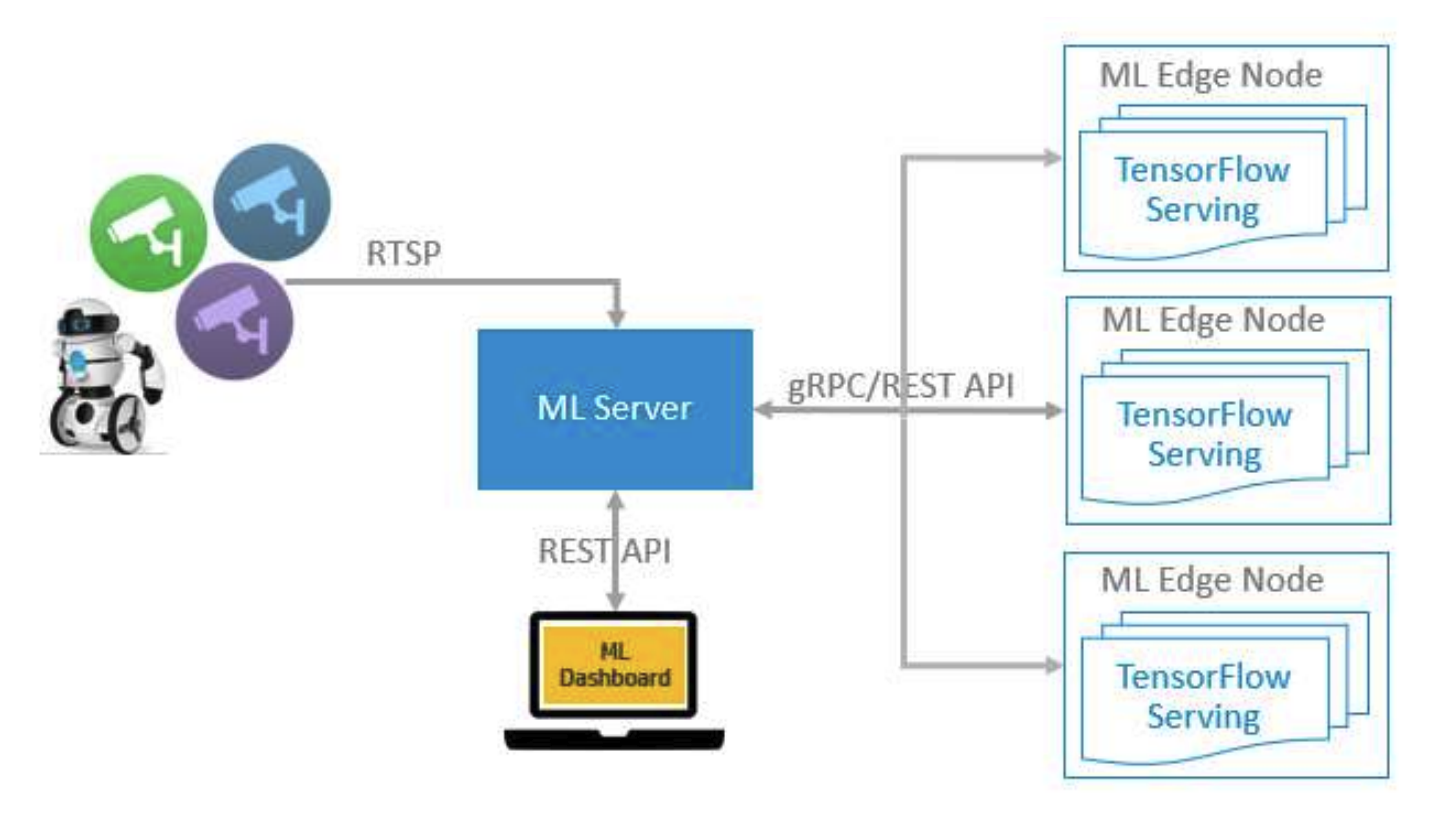
During my PhD, I spent summers at Cruise working on motion planning and control analysis and their large driving model. Before my PhD, I spent time at HP Labs in Palo Alto, CA as a Roboticist and Research Engineer, working across mobile robotics, AI/ML, 3D printing, and edge compute.
People describe me as "an all-around great guy."